Le robot se déplace d’un point à un autre en suivant un marquage au sol (ligne noire). Pour assurer cette fonction il est équipé d’un module suiveur de ligne composé de deux capteurs optiques.
Tant que les deux capteurs détectent la ligne le robot avance (situation 1 sur la fiche). Lorsqu’un des deux capteurs ne détecte plus la ligne, le robot tourne sur lui même pour se remettre dans l’axe (situations 2 et 3 sur la fiche). Si les deux capteurs sont en dehors de la lign, le robot recule (situation 4 sur la fiche).
Problématique : Comment rendre le robot mBot autonome dans ses déplacements ?
Séance 01:
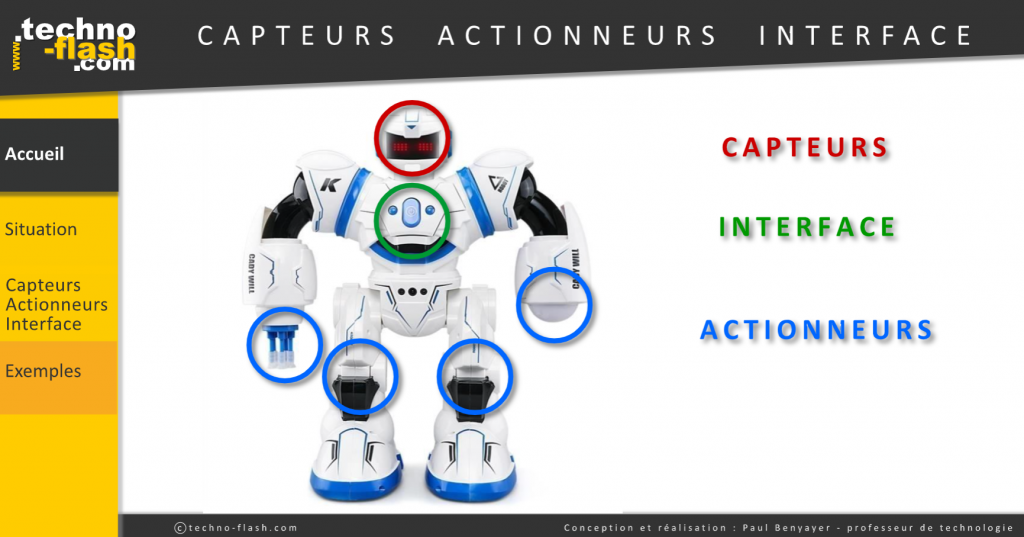
Problématique : Comment se comporte le robot Mbot ?
Ressource sur les capteurs, actionneurs et interfaces (réalisée par Paul BENYAYER)
Séance 02 :
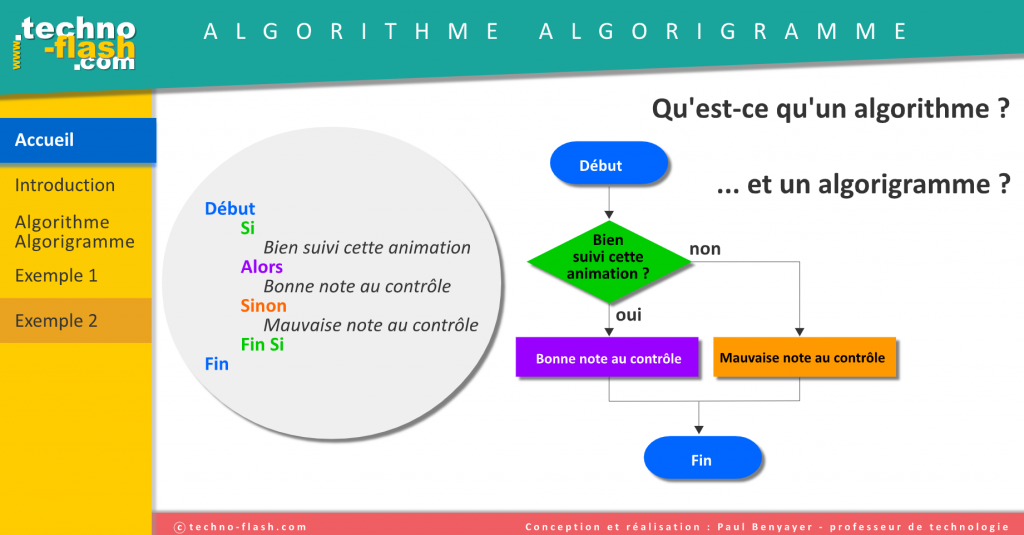
Problématique : Comment réaliser l’algorigramme de notre robot mBot ?
Séance 03 :
Problématique : Comment programmer le robot ?